众合森ZOOSEE
最贴合的您想法的机器人视觉处理

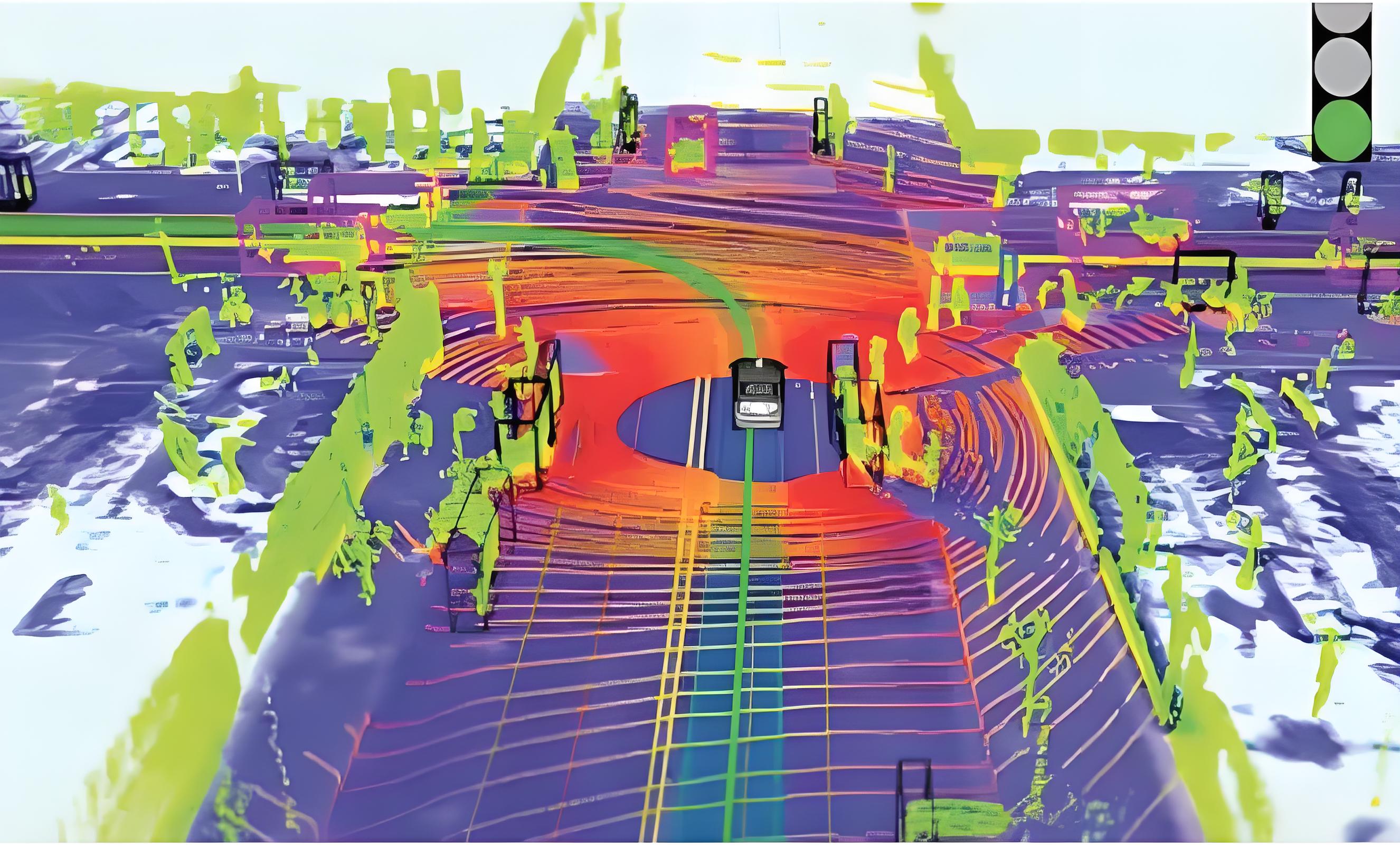
3D 视觉与 SLAM 技术融合,机器人导航能力大幅提升
近期,一项结合 3D 视觉与同步定位与地图构建(SLAM)技术的研究成果引发了广泛关注。
该技术结合深度相机和激光雷达,使机器人能够在复杂环境中实时构建高精度三维地图,并实现精准定位和自主导航。研究团队表示,新算法在动态环境中的鲁棒性显著提升,即使在光线不足或物体移动的情况下,机器人也能稳定运行。
在技术方面,该系统引入了神经辐射场(NeRF)技术,使机器人可以从少量图像中重建高质量的三维场景。
同时,该系统结合了多传感器数据融合,使其在各种环境下的稳定性大幅增强。相比传统 SLAM 技术,该方案显著降低了计算成本,同时提高了环境感知的精准度,使机器人能更快适应新环境。
该技术在仓储机器人、服务机器人和无人机领域均有成功应用。例如,智能仓储机器人利用该技术实现自动路径规划和避障,提高物流运输效率;无人机可通过 3D 视觉技术进行精准自主飞行,实现更高精度的航拍和测绘任务。
此外,该技术还可用于自动驾驶汽车,使其在复杂路况下实现更加精准的导航和决策。
随着 3D 视觉技术的成熟,机器人导航能力将迎来新一轮升级,推动更多场景的智能化应用,进一步拓宽机器人在工业、农业和消费级市场的应用边界。
网络图片,如有侵权请联系删除
关键词:机器人视觉|自动化设备|智能机器人|工业设备|智能应用|规模化智能设备




 渝公网安备 50019002501890号
渝公网安备 50019002501890号